The Cognavitron — hover for details · click to navigate · double-click for full size
Geospatial AI
geospatial-ai
deep-learning
remote-sensing
habitat-mapping
suav
AI and machine learning for ecological mapping and monitoring from aerial and satellite imagery — habitat classification, species detection, and landscape change.
Small uncrewed aerial vehicles (sUAVs) combined with AI make it possible to map and monitor habitats and wildlife at scales and resolutions that were previously impractical. A single flight can produce centimeter-scale orthomosaics covering hectares; deep learning models can then detect, classify, and count objects in those images automatically.
My work in this area combines UAV-based field data collection with AI/ML pipelines for habitat classification, invasive species detection, wildlife surveys, and landscape change monitoring. The goal is a practical, deployable workflow that produces actionable ecological information — not just pretty maps.
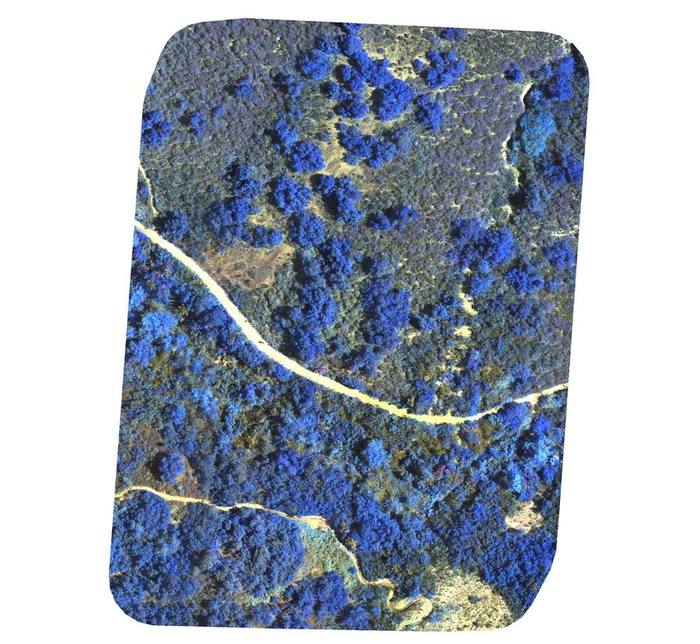
The orthomosaics below are from a recent flight over a chaparral site. The RGB image shows the scene as it appeared from the air; the false color composite (R-G-NIR) renders near-infrared as blue, making photosynthetically active vegetation stand out clearly from bare ground and dry material.

Vegetation Analysis
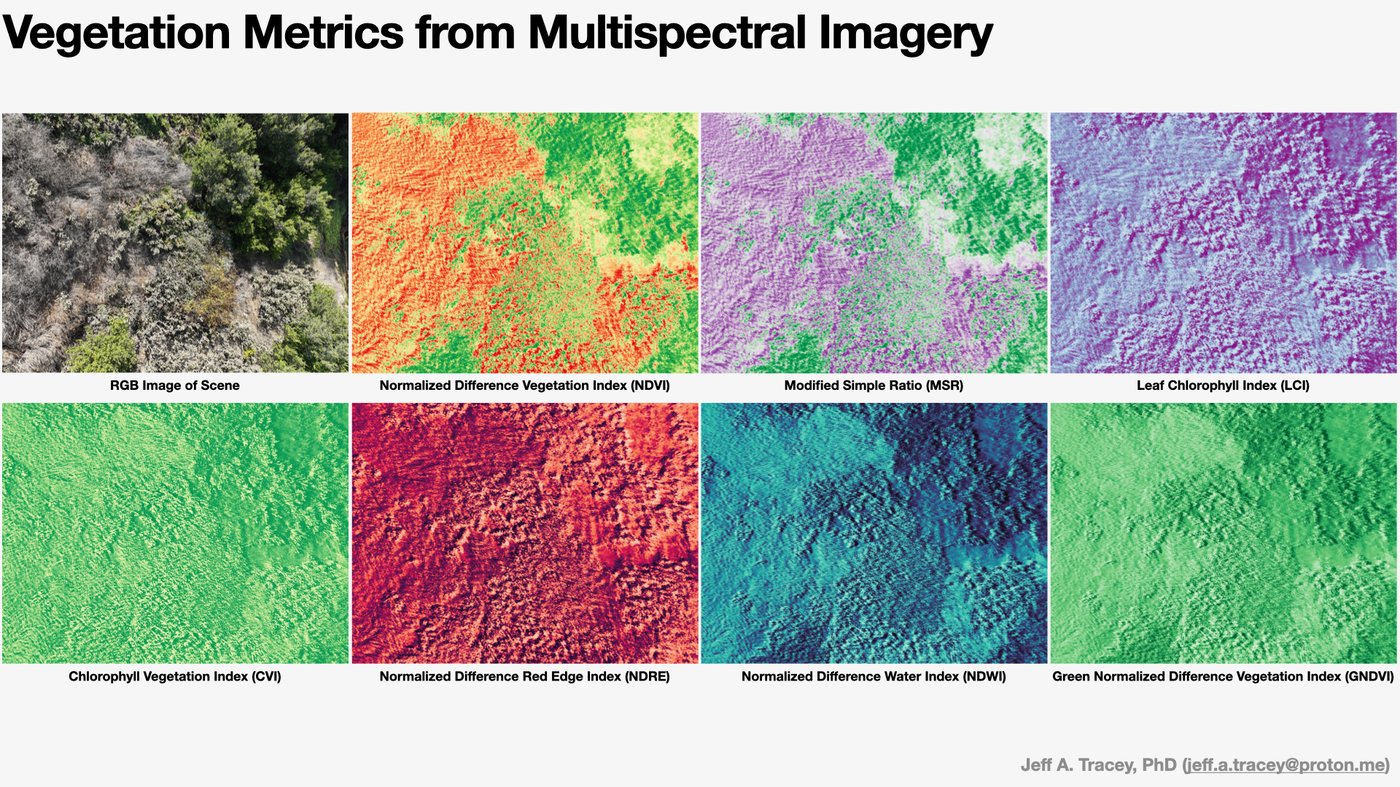
Multispectral imagery from UAV flights enables calculation of a range of vegetation indices beyond simple RGB. The figure below shows several indices derived from the same scene — each one sensitive to different aspects of canopy condition, chlorophyll content, water stress, and photosynthetic activity.
Marine Wildlife Detection
Shallow nearshore waters are difficult to survey by traditional methods — transects are slow, and many species are cryptic or mobile. UAV surveys combined with deep learning offer a scalable alternative: a single flight covers a large area, and a trained detection model can identify and locate animals in the imagery automatically.
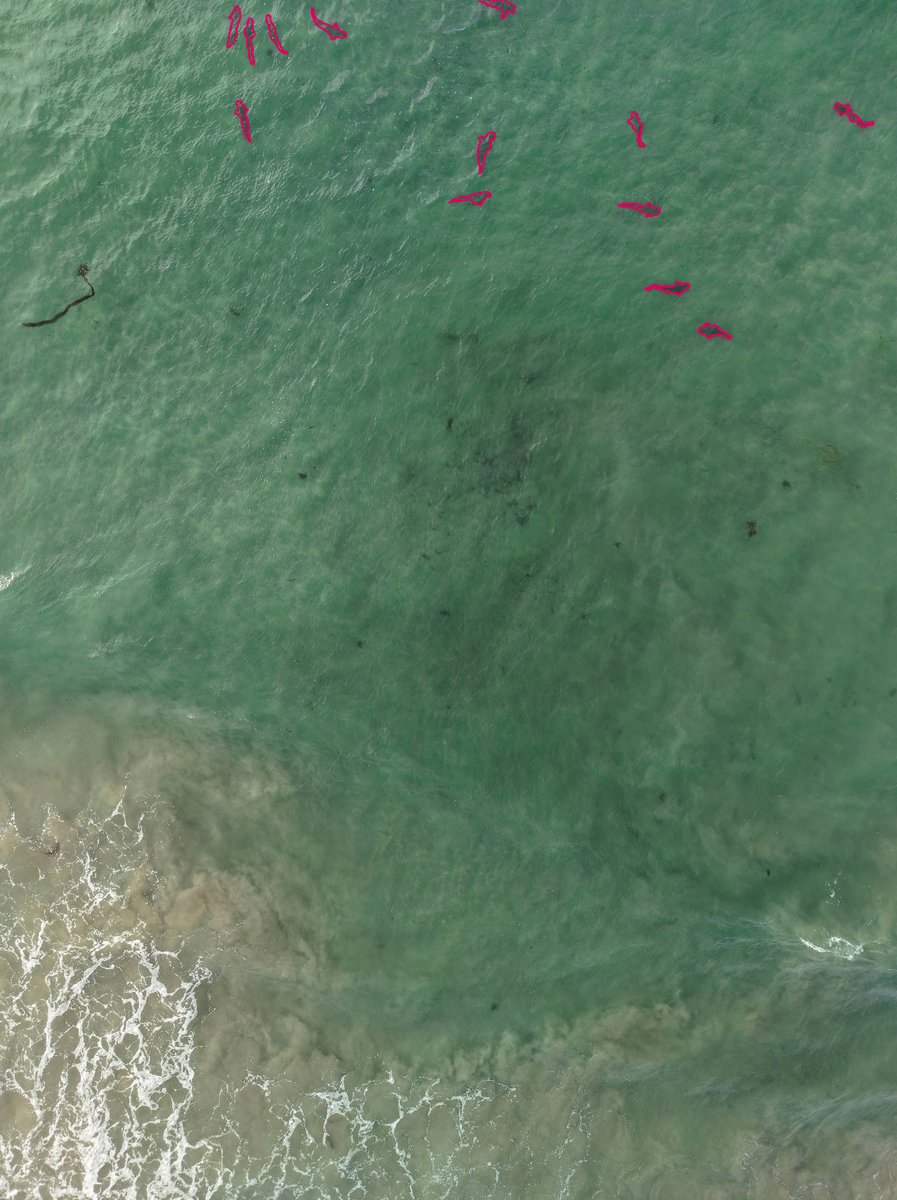
Current work focuses on building instance segmentation models for detecting and classifying marine wildlife from drone footage. The image below shows a sample frame during the annotation phase, with individuals marked for model training.
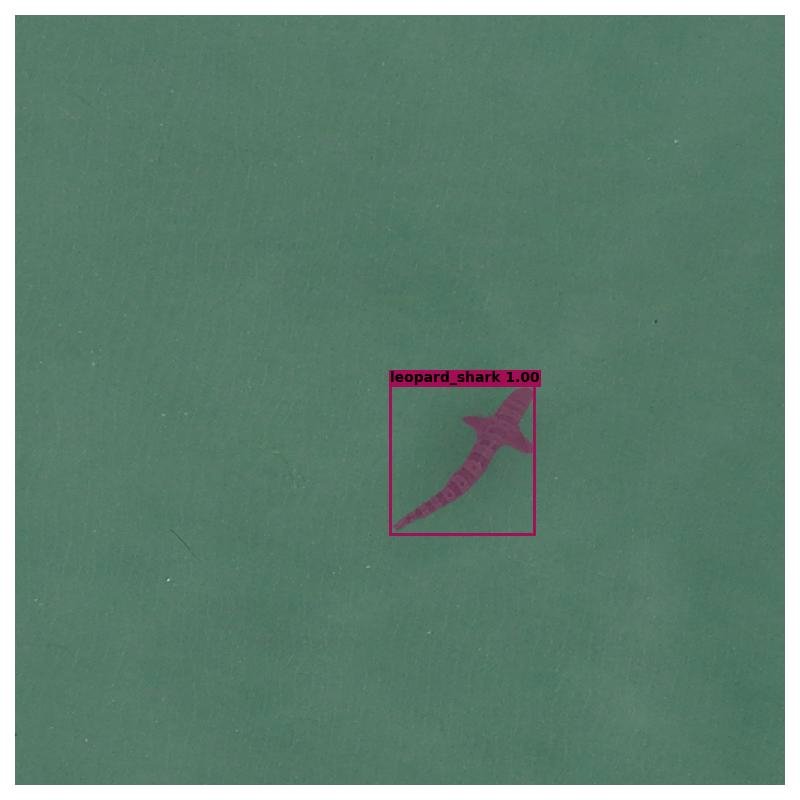
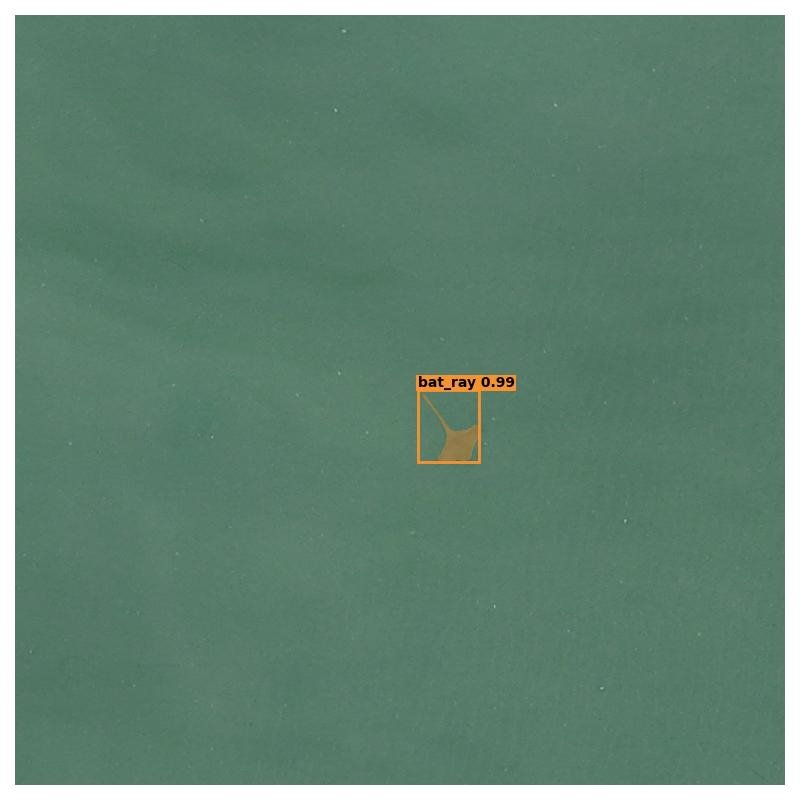
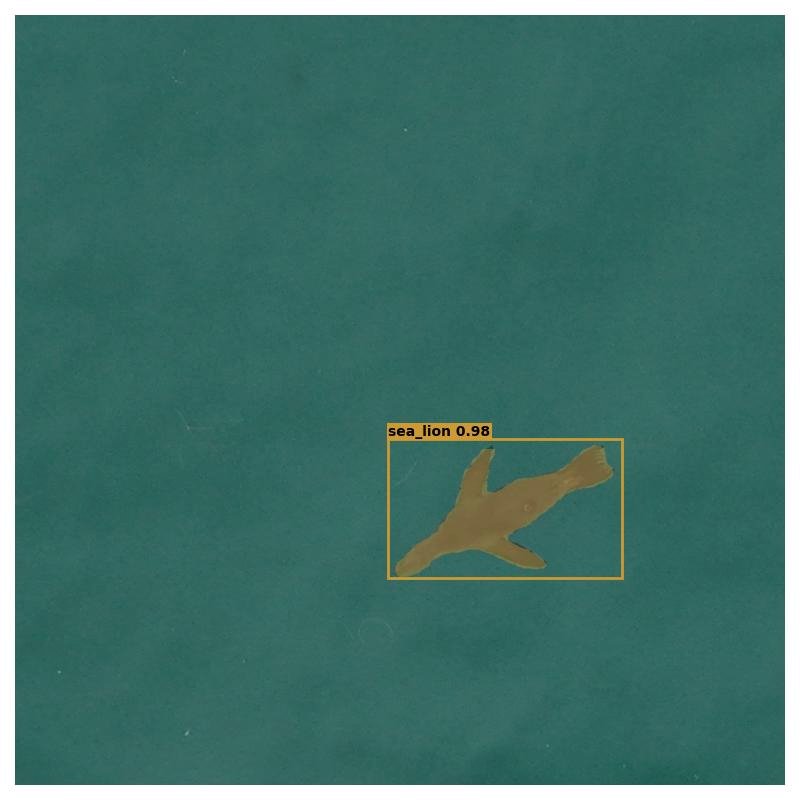
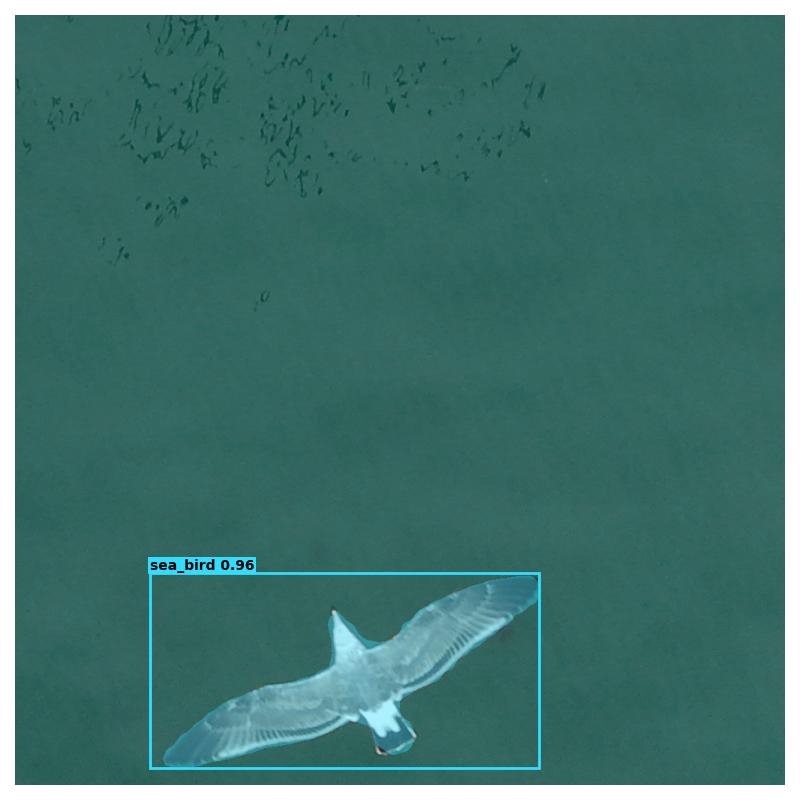
The trained model detects multiple species in the same imagery. A selection of segmentation masks from model output:
Details to follow as work is published.